
ZXQ电动阀门智能定位器(2)
主要类别:执行器及附配件
发布日期:2019-06-30
浏览次数:
二、定位器面板
|
参数显示 |
1 |
LED视窗 |
通过按键切换显示阀门实际开度值、阀门设定开度值、定位器壳内温度和设定参数 |
|
状态指示 |
2 |
OPEN |
输出控制“开”继电器闭合 |
|
3 |
SHUT |
输出控制“闭”继电器闭合 |
|
|
4 |
MANU |
手动状态 |
|
|
5 |
AUTO |
自动状态 |
|
|
模式指示MODE |
6 |
DRTA |
正动作模式,输入信号对应输出如下:4mA-满位(一般标定为全开)20mA-零位(一般标定为全闭) |
|
7 |
RVSA |
逆动作模式,输入信号对应输出如下:4mA-零位(一般标定为全闭)20mA-满位(一般标定为全开) |
|
|
8 |
OPEN |
输入信号中断模态为“开”,使执行器开至最大开度限位处 |
|
|
9 |
STOP |
输入信号中断模态为“停”,使执行器停在当前位置 |
|
|
10 |
SHUT |
输入信号中断模态为“闭”,使执行器开至最小开度限位处 |
|
|
按键 |
11 |
A/M |
手动/自动切换键,参数的进入修改和切换键 |
|
12 |
▲ |
数值增加键,自动状态下还用于切换显示阀位设定开度值,手动状态下为“开” |
|
|
13 |
▼ |
数值减少键,自动状态下还用于切换显示定位器壳内温度,手动状态下为“闭” |
三、接线方式
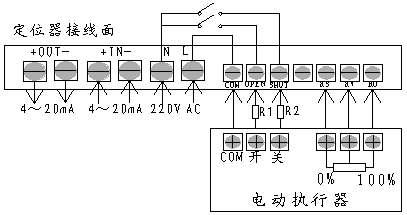
参照下图仪表接线端子和仪表外壳上的接线图连接好电动执行器和电源连线,注意连接时的极性,为减少电机干扰,应将电动执行器的电机控制线和反馈信号线分开走线;仪表的弱电信号线应尽量短些,若必须使用较长的连线时,应采用屏蔽信号线,外屏蔽与控制柜外壳妥善接地。
定位器与电动执行器通过一个七线接插件连接,其中定位器上GND端可以与电动机执行器外壳连接或悬空不接;RO、RV、RS分别接电动执行器内的反馈电位器的三个端子,其中RV接电位器的滑臂,RO接执行器开动作与滑臂之间电阻不断减小一端,RS则接另一端;SHUT、OPEN、COM分别接执行器伺服电机的闭、开、COM端子。
注:为了减弱执行器启动停止时电流冲击,一般在“OPEN”、“CLOSE”分别与执行器中的“开”、“闭”间接上4Ω/5W的水泥电阻(如图下R1、R2)。
注:定位器COM、OPEN、SHUT为有源输出端子,COM、OPEN与COM、SHUT对应输出电压为电源电压。